商用机器人就拿咱们最常见的扫地机器人来说,目前市面上的扫地机器人多采用视觉SLAM的导航方式。扫地机器人系统通常由四个部分组成:移动机构、感知系统、控制系统和吸尘系统。移动机构是扫地机器人的主体,决定了机器人的运动空间,一般采用轮式机构。
感知系统一般采用超声波测距仪、接触和接近觉传感器、红外线传感器和CCD摄像机等。可以看到,以上用与感知的设备成本想必工业移动机器人的激光雷达及配备的感知器、摄像机而言,成本相差数十倍。但是满足扫地需求还是没有问题的。主要保证机器人能够在平面内移动。壳体前端和侧面装有红外开关,作为碰撞检测传感器。底面的3个红外开关作为台阶检测传感器,防止跌落。驱动轮上装有光电编码盘,可以对轮速进行检测和控制,实现定位和路径规划。同时还扩展了超声波传感器,用于精确定位的需要;
随着近年来计算机技术、人工智能技术、传感技术以及移动机器人技术的迅速发展,扫地机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。扫地机器人的控制与工作环境往往是不确定的或多变的,因此必须兼顾安全可靠性、抗干扰性以及清洁度。用传感器探测环境、分析信号,以及通过适当的建模方法来理解环境,具有特别重要的意义。近年来对智能机器人的研究表明,对于工作在复杂非结构环境中的自主式移动机器人,要进一步提高其自动化程度,主要依靠模式识别及障碍物识别、实时数据传输及适当人工智能方法,还需要进一步开发全局模型,从而为机器人获取全局信息。
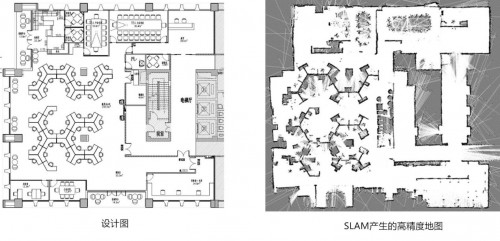
当然,在一些高精度要求的商业服务复杂场景,激光SLAM技术也有实战的空间,价格也会跟着昂贵起来。它们已在餐厅、商场、酒店、银行、医院等各大服务场所中“崭露头角”,尤其在本次疫情抗击中,激光SLAM自主移动机器人更是站上了“风口浪尖”。一时间医护助理机器人、清洁消毒机器人、运输配送等机器人出现在各个领域的前线,减少了人与人之间的近距离接触,最大程度的保证了相关人员的安全。精细化构图技术,可构建高精度、厘米级甚至毫米级(毫米级一般是工业标准)的地图,具备超高分辨率,且不存在累加误差。构建的地图规则、精细,可直接使用,无需二次优化修饰,能直接满足使用预期。在复杂多变,环境不受控制的应用场所(如医院、商场、写字楼等人流量大场所)行走时,可实时动态识别环境中的人或者移动障碍物,并进行灵活规避和路线规划。
工业移动机器人
在工业领域,移动机器人已经成为一种验证工厂自动化的标准和潮流。抛开SLAM技术不谈,磁条和二维码技术在工业和仓储领域的使用由来已久,行业也积累了相当丰富的经验。但随着自动化水平的提高,工厂生产对产线的要求也趋于多样化、多频次、小周期。因此,产线灵活柔性的要求应运而生,SLAM技术刚好便可以解决这一需求。但是视觉SLAM在图像处理中,边缘锐化、特征提取等图像处理方法计算量大,实时性差,对处理机要求高。另外,视觉测距法检测不到玻璃等透明障碍物的存在,另外受视场光线强弱、烟雾的影响大。因此不作为主流使用,一般都是视觉传感作为辅助搭配激光SALM进行工作。
不管是 Sick,倍加福,还是 Velodyne,价格从几万到几十万不等,成本相对来说比较高,但目前国内也有低成本激光雷达(RPLIDAR)解决方案。VSLAM 主要是通过摄像头来采集数据信息,跟激光雷达一对比,摄像头的成本显然要低很多。但激光雷达能更高精度的测出障碍点的角度和距离,方便定位导航。
除配备激光雷达外,还需要机器人具有IMU(惯性测量单元)、里程计来为激光雷达提供辅助数据,否则SLAM系统也难以得到运行。总的来说,SLAM算法本身是一个对于外部系统有着多种依赖的算法,这是一个切实的工程问题。我们知道很多机器人,比如扫地机是不可能装一个PC进去的。为了让SLAM能在这类设备里运行,除了解决激光雷达成本外,还要对SLAM算法做出很好的优化。目前斯坦德机器人已经完美实现了各环节的自主研发和项目落地验证,在业内激光SLAM技术上领跑各行。








